? ? ? ?南方科技大學生物醫學工程系張明明助理教授研究團隊2019級博士研究生鐘斌在機器人工程領域旗艦期刊IEEE Transactions on Automation Science and Engineering(IF=5.293)上發表最新研究成果,該研究提出了一種基于滑模控制策略的下肢外骨骼關節位置及柔性同步控制算法,適用于人造氣動肌肉驅動的康復設備,實現了按需輔助的柔順控制提升了康復的效果。

? ? ? ?按需輔助策略能夠顯著提升患者在機器人輔助康復過程的積極性從而提升康復效果,同時人機交互的安全性是所有康復設備的首要考慮因素。人造氣動肌肉其獨特的柔性使得它可以作為康復設備驅動器的良好選擇,而氣動肌肉自身固有的非線性特點也使得構建精確的數學模型極具挑戰。該研究提出了一種采用人造肌肉的平均壓力作為反饋來評估患者的實時參與程度,并同步實現關節位置控制和關節柔性控制。關節的柔性及輔助力大小通過反饋評估進行實時調節,最終實現按需輔助的康復策略。驗證實驗一共12受試者參加,實驗結果表明,系統在該算法下能夠以較小的誤差跟隨下肢關節的運動,同時評估受試者的參與程度進行輔助力調節。該研究結果對人造氣動肌肉在康復設備中的廣泛應用具有重要意義。
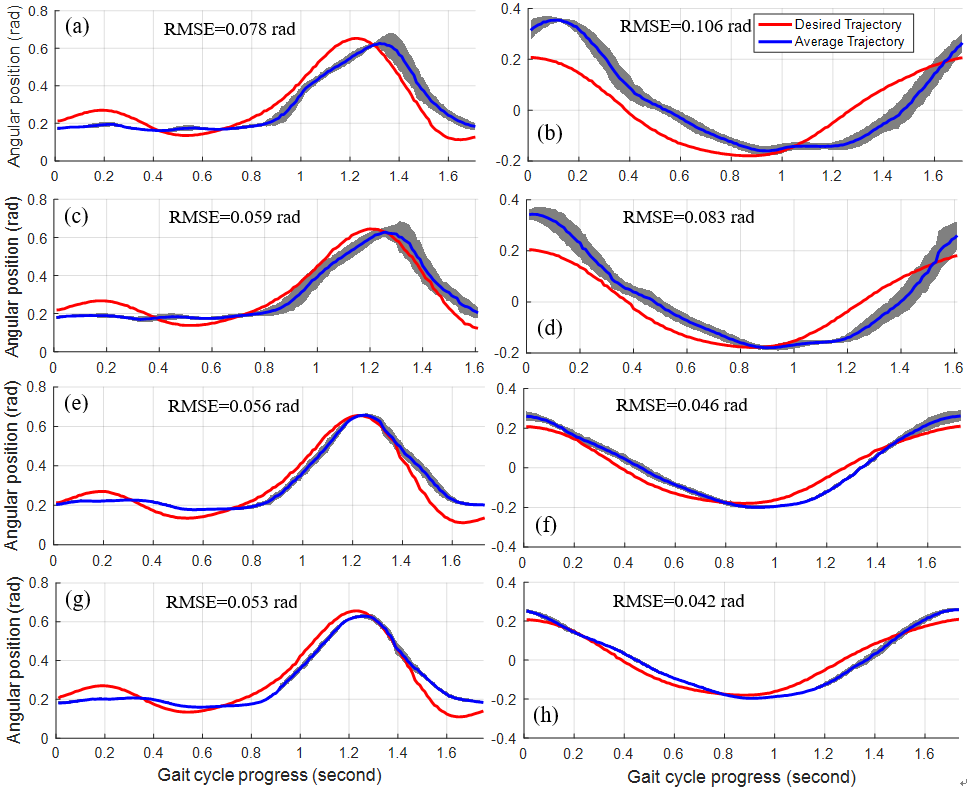
? ? ? ?The comparison between the desired and actual gait trajectories of the two actuated joints during the validation experiments. The trajectories have been normalized to one gait cycle. The red lines are the predefined reference gait trajectory. The blue lines represent the average gait trajectories over the experimental period. The shaded area stands for the standard deviations of the average trajectories over the recorded gait cycles. Subplots (a, c, e, g) are the trajectories of the knee joint and subplots (b, d, f, h) are for the hip joint. The subplots in the top, second, third and bottom rows are for experiments with desired average antagonistic PM pressures 160, 240, 320 and 400 KPa respectively.
?
? ? ? ?南科大2019級博士生鐘斌為本文第一作者,張明明助理教授為通訊作者,南科大為第一單位和通訊單位。該研究獲得了國家自然科學基金、廣東省自然基金和廣東省普通高校青年創新人才項目的資助。
供稿:鐘斌

廣東省深圳市南山區
學苑大道1088號
bme@sustech.edu.cn

關注微信公眾號




